News
Bachelor student Dewwret Sitaldin wins first prize 3-E Royal SMIT BSc prize
- Thursday, 9 April 2020

Abstract
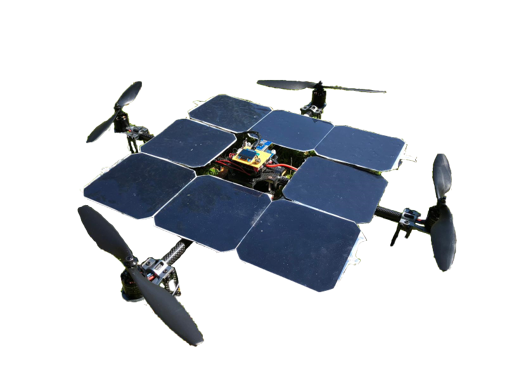
The main goal of this Electrical Engineering Bachelor project is to build a solar-power system for a quad-copter that will extend its battery life or rather its flight time. The complete system is comprised of a PV system (PV), a micro-controller (MC) and a DC/DC converter (DC) which was mounted onto the drone. On each subsystem, a separate thesis was written and this paper serves as a general yet complete overview of the design process, simulations and test results of a fully functioning solar drone with the theses attached as appendices for reference.
The original (optimistic) aim of an extension of at least 25% of the battery lifetime was set by our supervisors. For the PV part SunPower C60 IBC cells were used (no specific selection was done) together with a (borrowed) custom-built drone (not built by this team, it was borrowed from another research group) as a starting point. After analysing the limitations of the drone and the cells, multiple configurations were designed and a mathematical model that determines power usage, energy costs per solar cell and the optimum amount of cells was developed. A SEPIC converter will extract solar energy from a PV-module in order to charge the battery of the drone. The converter will be controlled by the micro-controller subgroup using MPPT (Maximum Power Point Tracker) algorithm and this will be done by supplying a PWM signal to the converter.
Since the drone was not specifically designed for the project (thus not optimised when it comes to lift capacity and room for cell placement), the efficiency of the solar cells was not sufficient to extend the fight time by 25% (15.1% in summer, 5.6% in winter). Since these bottlenecks can easily be eliminated by replacing the drone and the cells, these results serve as a proof of concept and are an excellent starting point for future research