MSc thesis project proposal
Packet Separation and Interference Cancelation for Unmanned Arial Vehicles
In recent years there has been growing interest in the applications of unmanned aerial vehicles (UAVs), for smart agriculture, remote sensing, rescue and search operations, delivery of goods and many more. Depending on the specific application, UAVs are equipped with various types of sensors such as radars, microphone arrays, high resolution and thermal cameras. These sensors generate a high volume of data which needs to be transmitted to the ground stations in real time. Therefore, high throughput communication link, i.e. downlink, is needed to support transfer of data from UAV to the ground.
The control and navigation of the UAV from the ground are done using the control communication link, i.e. uplink. To support reliable control and coordination of the UAVs from the ground, uplink must provide low throughput but robust and low-latency communication. Recent measurements campaigns of ground-to-air (G2A) radio channels showed the high impact of the altitude on the channel parameters including path loss exponent, small-scale fading and shadowing effects.
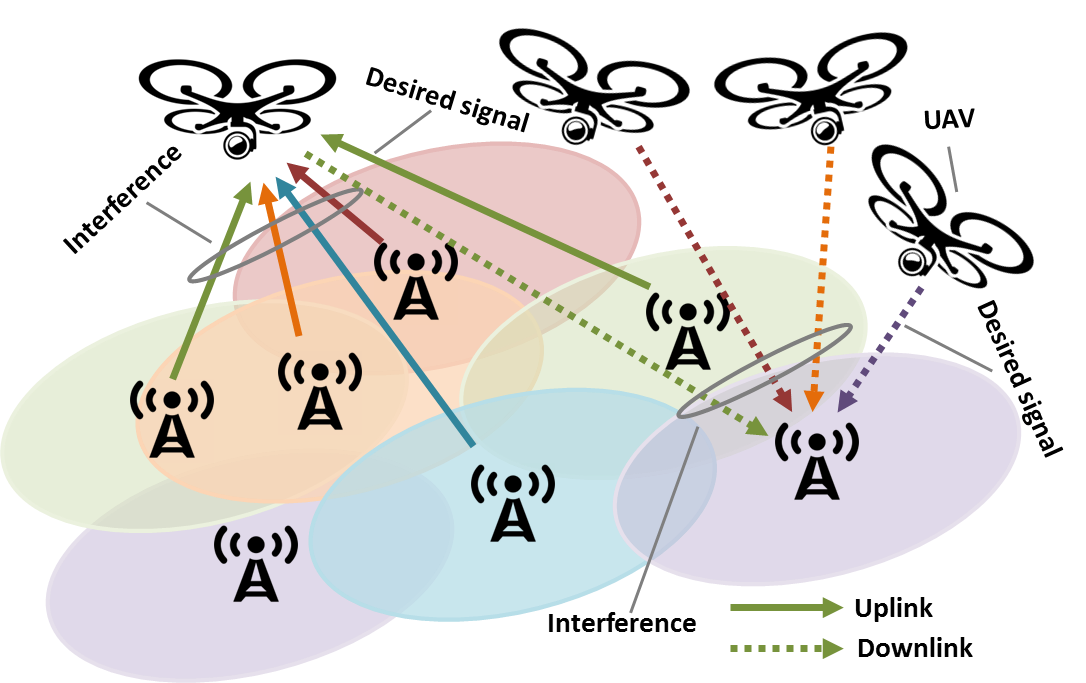
In particular, G2A channels showed (i) presence of strong line-of-sight (LOS) multipath components coming from a number of ground stations and (ii) increase in the number of accessible ground stations with the rise of the altitude. The LOS propagation benefits come at the cost of signal interference in the uplink due to a large number of strong ground signals overlapping at UAV. Likewise, the interference at ground stations increases with the number of UAVs in the specific area. Therefore, to ensure high throughput downlink and reliable uplink communication links with UAVs it is crucial to study the problem of signal interference cancelation and packet separation.
Assignment
The problems of interference cancellation and packet separations are primary issues for communication between UAVs and ground stations. Over the past decade, orthogonal frequency-division multiplexing (OFDM) emerged as a dominant technology for wideband multicarrier communications due to its advantages such as spectral efficiency, simple channel equalization, and efficient hardware implementation. However, the interference cancellation of the OFDM signals is still challenging, and it is one of its major disadvantages. Typically, the problems of the interference control in dense OFDM based networks, i.e. WiFi and LTE, are solved using centrally coordinated medium access control. However, this approach is not applicable to the UAV scenarios and, therefore, requires further research and engineering efforts.
In this project, your task is to derive a generic and precise model for OFDM systems, e.g. WiFi (IEEE 802.11a/g), considering harsh interference scenarios. Typically, the packets partially overlap in the time domain while in the frequency domain they can partially or fully overlap depending on the radio channel selection. Starting from the derived signal model, you need to develop an algorithm for interference cancellation and packet separation taking into account implementation and computational complexity.
Further, you will have the opportunity to build the prototype of a communication system based on a developed algorithm using Software Defined Radios, e.g. USRPs.
Requirements
This project requires a self-motivated master student with a strong background on statistical signal processing, array signal processing, estimation theory and knowledge of wireless communications.
The ideal candidate feels challenged by both theoretical and practical problems. The first stage of the project, i.e. development of the data model and algorithm, requires knowledge of Matlab or Python. The proof of concept prototyping will be done either in GnuRadio or Matlab using USRPs and requires some knowledge or strong will to learn Linux, C++, and Git. Through the project, the candidate will have the opportunity to develop industry-relevant signal processing and engineering skills.
Contact
prof.dr.ir. Alle-Jan van der Veen
Signal Processing Systems Group
Department of Microelectronics
Last modified: 2023-01-13